| Go Back |
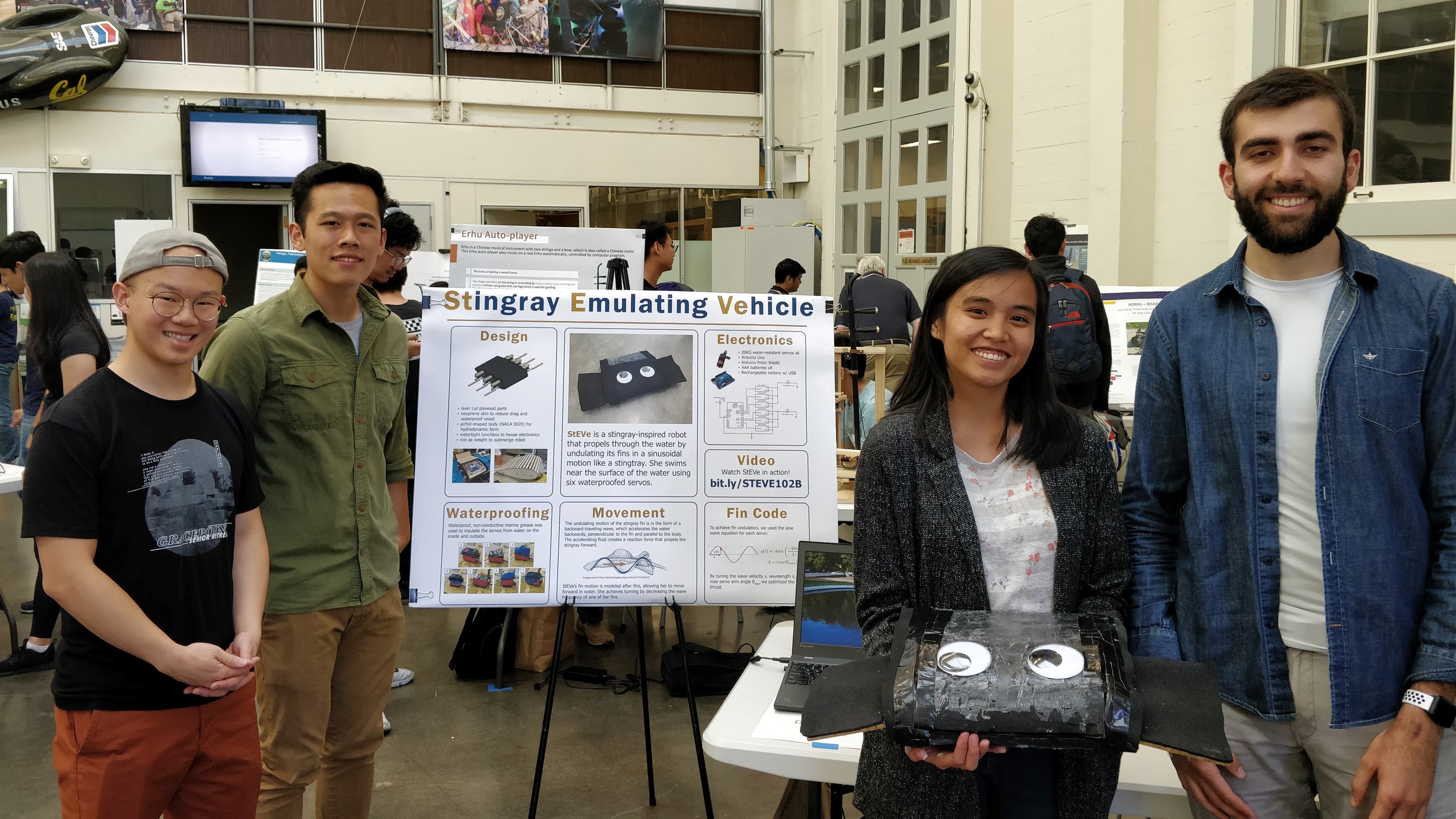 |
ME 102B ProjectTeammates: Arman Mesropyan, Elton Su, Charles Lin Main roles: SolidWorks modeling, theoretical calculations, development of fin undulation model, Arduino code, electronics prototyping and assembly STEVE (Stingray Emulating Vehicle) is a stingray-inspired robot that propels through water by undulating its fins in a sinusoidal motion, imitating a stingray. It swims near the surface of the water using six waterproofed servos. There has been rising scientific interest in stingray-like robots, since fin undulation is an efficient method of underwater propulsion and causes little disturbance in the water, making such robots appealing for ocean life research. For this project, we wanted to develop our own stingray-inspired robot that was cost-effective. Our two main goals were waterproofing and effective propulsion by fin undulation. |